Let \(\E\) denote the subgroup of the Möbius group \(\M\) generated by rotations and translations, that is, transformations of the type \(z\to e^{it}z\) for \(t\in \R\) and \(z\to z+b\) for \(b\in
C\text{.}\) The geometry \((\C,\E)\) is sometimes called “Euclidean geometry”. Is \((\C,\E)\) equivalent to the Euclidean geometry defined in Subsection 3.1.1? Why or why not?
5.Alternative derivation of the formula for elliptic group elements.
To obtain an explicit formula for elements of the elliptic group, we begin with a necessary condition. Let \(R=s^{-1}\circ
T\circ s\) be the rotation of \(S^2\) that lifts \(T\) via stereographic projection. If \(P,Q\) are a pair of endpoints of a diameter of \(S^2\text{,}\) then \(R(P),R(Q)\) must also be a pair of endpoints of a diameter. Exercise 1.3.4.7 establishes the condition that two complex numbers \(p,q\) are stereographic projections of endpoints of a diameter if and only if \(pq^\ast = -1\text{.}\) Thus we have the following necessary condition for \(T\text{.}\)
Now suppose that \(Tz=\frac{az+b}{cz+d}\) with \(ad-bc=1\text{.}\) Solving the equation \(Tp =
\frac{-1}{(T(\frac{-1}{p^\ast}))^\ast}\) leads to \(c=-b^\ast\) and \(d=a^\ast\text{.}\) Thus we conclude that \(T\) has the following form.
6.Identifications of \(U(\Quat)\) and \(\S\) with \(\Rot(S^2)\).
The discussion of elliptic geometry (Section 3.4) establishes two ways to construct rotations from matrices. The purpose of this exercise is to reconcile these identifications. Given \(a,b\in \C\) with \(|a|^2+|b|^2=1\text{,}\) let us define the following objects, all parameterized by \(a,b\text{.}\)
This problem is about comparing the rotations \(R_{r_{a,b}}\) and \(R_{T_{a,b}}\) (see Table 3.6.1) and reconciling the difference. The angles of rotation are the same, but the axes are different, but only by a reordering of coordinates and a minus sign.
where \(h\colon \R^3\to \R^3\) is given by \((x,y,z)\to (z,-y,z)\text{.}\) Here’s one way to do this: evaluate both sides of (3.6.5) on the three points \(p,0,\infty\text{.}\) Explain why this is sufficient! Use quaternion multiplication to evaluate \(R_{r_{a,b}}\text{.}\) For example, \(R_{r_{a,b}}(1,0,0)=r_{a,b}ir_{a,b}^\ast\) under the natural identification \(\R^3\leftrightarrow \R^3_\Quat\text{.}\)
Here is one way to reconcile the quaternion path (3.6.3) with the Möbius path (3.6.4). Let \(H=\frac{1}{\sqrt{2}}\left[\begin{array}{cc}
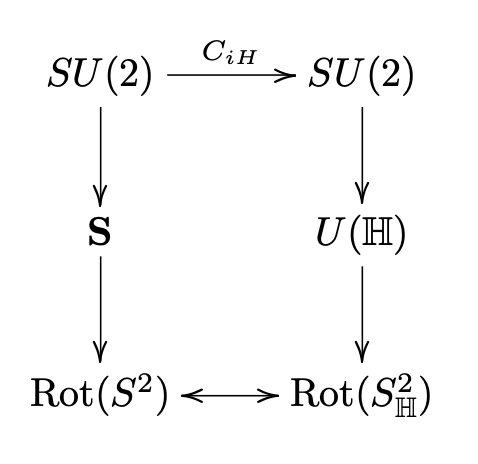
1\amp 1 \\ 1\amp -1\end{array}\right]\) (the matrix \(H\) is sometimes called the Hadamard matrix) and let \(C_{iH}\) denote the map \(M\to (iH)M(iH)^{-1}\text{.}\) Show that the diagram in Figure 3.6.2 commutes. Hint: Notice that \(iH\in SU(2)\) and that \(Q(iH)=\frac{1}{\sqrt{2}}(i+k)\text{,}\) and that \(R_{Q(iH)}=h\text{.}\)
Figure3.6.2.The map \(C_{iH}\) is given by \(C_{iH}(T)=(iH)T(iH)^{-1}\text{.}\) The column of maps on the left is the “Möbius path”, and the column of maps on the right is the “quaternion path”.
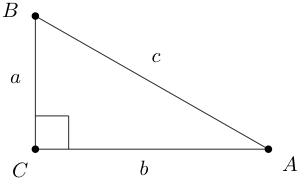
Let \(\triangle ABC\) be a right triangle with right angle \(\angle C\) with side lengths \(a=d(B,C)\text{,}\)\(b=d(A,C)\text{,}\) and \(c=d(A,B)\) so that the length of the hypotenuse is \(c\text{.}\) See Figure 3.6.3.
Suggestion: Use a transformation to place \(C\) at \(0\) in \(\D\) or \(\extC\text{,}\) with \(A\) real and \(B\) pure imaginary. Use the formula \(d(p,q) =
\ln((1+u)/(1-u))\) with \(u=\left|\frac{q-p}{1-p^\ast q}\right|\) for hyperbolic distance. Use the formula \(d(p,q) =
2\arctan(u)\text{,}\) with \(u=\left|\frac{q-p}{1+p^\ast
q}\right|\) for elliptic distance. The identities from part (a) will be useful.